Cobots: 14 Things You Need to Know
What jobs do cobots do well? How is a cobot programmed? What’s the ROI? We asked these questions and more to four of the leading suppliers of cobots.
#robotics
.jpg;width=70;height=70;mode=crop)
Share
Collaborative robots—or “cobots”—are finding increased application in production operations. But how do you know if one is right for you?
We asked some of the leading suppliers of cobots—FANUC America, Yaskawa Motoman, ABB Robotics & Discrete Automation, and Universal Robots—questions that you may find useful as you make a decision about the equipment.

Andie Zhang, ABB Global Product Manager – Collaborative Robots, and the single-arm YuMi cobot. (Image: ABB)
1. What do cobots do well?
“Like ‘standard’ robots, jobs that cobots do well are repetitive tasks where quality may be a concern. The element of an Associate safely working in concert with the collaborative robot to complete the operation is what is fueling the adaptation of collaboratives.”-- Neil Dueweke, vice president of Automotive OEM Robotics Sales and Execution groups, FANUC America
“Cobots are very good at working in close proximity to a human worker, which is the main advantage they have over industrial robots. Cobots contain internal sensors that detect when contact is made with a human worker and safely arrest motion until it is safe to move again. Industrial robots can be equipped with safety-rated sensors to operate without physical guarding but must stop when a person encroaches on the safety monitored area set by the risk assessment.”--Michael Caster, Product Manager, Yaskawa Motoman
“Collaboration enables people and robots to safely work together for maximum flexibility and efficiency, sharing the same workspaces and even cooperating on the same tasks. This helps balance the imperative for safety with the need for productivity.”-- Andie Zhang, ABB Global Product Manager – Collaborative Robots
“Collaborative robots are well-suited to many of the high-quality and precision tasks involved in automotive production. They can be used to free humans from repetitive tasks such as screw driving, assembly, labeling, handling, and quality control. Collaborative robots can also be used in places where human workers may be subject to dangerous processes, such as engine foundries, laser-cutting rigs, molding machines, forming presses, and packaging and palletizing lines.” --Joe Campbell, senior manager of applications development, Universal Robots
2. What do cobots do not-so well?
“The current state-of-the-art production facility has cobots primarily involved with material handling/part placement/quality checking applications. More process-intensive applications like painting, sealing, welding are also starting to see cobots being applied. Like any other process oriented robot application, more attention needs to be paid to the total system operation for it to have a high degree of success.”—Dueweke
“Lift heavy items. Work in very dirty and hazardous environments. Do tasks that require the high speed and accuracy of industrial robots, such as high volume mass production.”—Zhang
“Cobots perform a huge number of applications well, but they are not as fast as traditional industrial robots and they are designed for smaller payloads.”—Campbell
3. Why a cobot rather than a SCARA or small Cartesian?
“Speed and reach will be the primary variables for whether a SCARA makes more sense than a collaborative robot.”—Dueweke
“A few things: most cobots are 6-axis robots, giving them movement similar to that of a human arm. SCARA and Cartesian robots are locked into movement in the X, Y, and Z direction. Most SCARA robots will also have the ability to twist the T-axis (4-axes of motion total). Cartesian robots are usually limited to 3-axes, but some do have tool rotation (4-axis). Also, SCARA and Cartesian robots lack the internal sensors for detecting the presence of humans, so they must operate with physical barriers or other safety equipment in place.”—Caster
“SCARA and Cartesian robots have fewer than 6 axes and are used for simpler applications. Collaborative robots provide greater flexibility, the ability to handle a wider range of robots without extensive tool changes, and the ability to work closely with humans. This flexibility is especially important because the trend in many industries is going from high volume/low mix to low volume/high mix manufacturing, and with shorter product lifecycles. This means manufacturers need more flexible automation solutions to adapt with speed and efficiency to the market. It also means manufacturing is becoming more sporadic and less predictable, which is harder to automate. Collaborative automation allows people and robots to work together to make manufacturing more flexible while maintaining safety and productivity.” –Zhang
“There are several reasons why it makes sense to choose a six-axis cobot over a SCARA or small Cartesian. Cobots are considerably easier to program, which has a big impact on maintenance and programming costs. Cobots are significantly cheaper than traditional industrial robots too. And, while traditional industrial robots tend to be static, single-purpose machines that are costly to reprogram, the leading cobots with six their six-axis degrees of freedom are versatile and can be deployed on a wide variety of both product types and applications, handling more applications requiring a more dexterous robot. Safety is another important differentiator; cobots usually don't require all the safety fencing that give traditional industrial robots such a large footprint. Ultimately, the choice between traditional industrial robots and cobots comes down to the application, while taking overall costs, ROI and cobot versatility into account.”—Campbell

FANUC cobot in a tire check application. Not all cobots are small. (Image: FANUC)
4. Are cobots just material-handling devices?
“Cobots are frequently used for material handling applications although some are being used for other applications including dispensing, screw and nut driving, material removal, and welding.”—Caster
“No, they can also handle complex and dexterous applications like small parts assembly, testing, screwdriving, and product inspection.”—Zhang
“It depends on the cobot. Some brands are capable across several application domains-- metrology, assembly, painting, gluing, material removal and welding tasks--others less so.”--Campbell
5. What keeps a cobot from falling over?
“A cobot must be securely bolted to a suitable base before it can be operated. Some are lagged directly to a concrete floor or metal plate although risers are frequently used. Other cobots are mounted to AGVs (autonomous guided vehicles), but care must be taken to ensure that the vehicle can cope with the reactionary forces that the robot can generate without becoming unstable.”—Caster
“Our cobots can be mounted in numerous different ways to ensure safety across different types of applications. For fixed applications, such as CNC machine tending, it's not uncommon to see our cobots on a pedestal stand that is secured to the floor. We also often see our cobots mounted directly to a table in a work cell, either sharing the space with or replacing a human operator. Cobots can also be mounted on walls and ceilings, or integrated with a mobile platform for even greater versatility.”—Campbell
6. How is a cobot programmed?
“Simple icon-based programming is predominantly used. However, for shops with a number of ‘standard’ robots, Associates like the ability to toggle between simple icon programming and the typical programming language used for non-cobot robots for the last several years.”—Dueweke
“There are several ways to program cobots from coding via traditional pendant software to intuitive hand-guiding techniques where users manually move the cobot to various points it needs to perform a task.”--Campbell
7. How fast do cobots move?
“Collaborative robots have move speeds that are dependent on the application in mind. Early collaborative had speed constraints. However, most current cobot offerings can move up to 1000 mm/sec.”—Dueweke
“When operating in environments where human contact may occur, cobots are speed limited to a maximum of 250mm/s. Depending on the risk assessment for the application, this speed may need to decrease.”—Caster
8. What makes a cobot safe?
“Collaborative robots adhere to one or more of the modes of collaboration as outlined by the Robotic Industries Association: (1) Safety-rated monitored stop, (2) hand guiding, (3) speed and separation monitoring, (4) power and force limiting by inherent design or control.”--Dueweke
“The internal sensors enable PFL (power and force limiting) and hand guiding, which are operating modes that most people associate with collaborative robots; there are two other modes of collaboration that can classify a robot as ‘collaborative.’ However, none of these modes make a cobot ‘safe.’ What makes a cobot safe is the risk assessment on the robotic application as a whole to determine if the application is collaborative and if it is indeed safe for humans to be near it while in operation. This risk assessment must include the robot, gripper, the part being manipulated, the operating environment, etc. Just having a cobot does not make an application safe, nor does it mean that additional guarding is not required for operation.”—Caster
“The first thing that makes cobots safe is the low payloads they are designed to handle and the low speeds at which they operate when compared to traditional, heavy duty industrial robots. But this only scratches the surface of cobot safety.”—Campbell
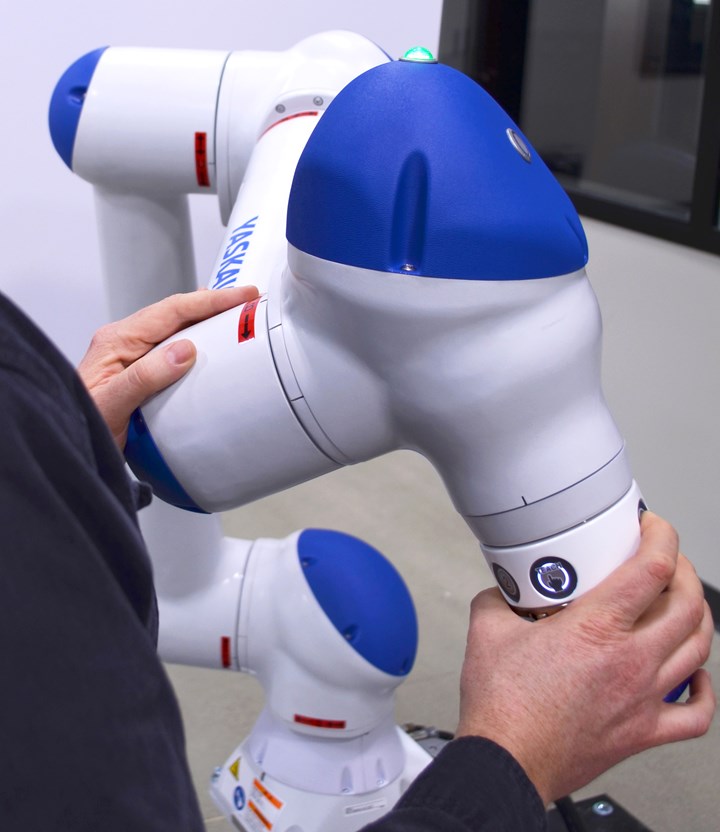
Hand guiding a Motoman HC10DT for programming. (Image: Yaskawa Motoman)
9. What happens if a cobot arm encounters a person?
“Cobots are often coupled with spatial sensors like floor scanners or light curtains. If these sensors detect the presence of a person or object within a programmed area, the robot will slow down based on the proximity of the person or object to the robot. If force is detected by the robot which is over the threshold set as a result of the risk assessment, the robot must arrest motion until the person is clear and out of harm’s way. Resetting the robot can be as simple as hitting a button and having it resume where it stopped or the job must be restarted from the teach pendant.”--Caster
10. What kind of end-of-arm tooling (EOAT) does a cobot have?
“A collaborative robot can generally use any end-of-arm tool that a traditional robot can use. While several companies are marketing collaborative tooling—usually having low power output/clamping forces—the user will still need to perform a risk assessment for their application to ensure it is not hazardous for humans.”—Dueweke
“EOAT vendors offer a variety of tooling specifically made for cobots. The tooling must be compliant with ISO/TS15066 for it to be rated for collaborative operation. This involves force sensing that can be set according to the risk assessment, and it cannot have any sharp edges.”—Caster
11. What is the size range of cobots?
“Collaborative robots can now easily handle payloads up to and including in the 35 kg range.” –Dueweke
12. How is ROI achieved with cobots?
“Our experience is there typically is a production quality improvement when collaboratives are introduced. Manpower savings is typically not the primary driver for using cobots. Cobots, in many cases, allow an Associate to work across two or three stations improving their efficiency while having the cobot perform the repetitive work in one station.”—Dueweke
“Most companies look to achieve ROI in a year or less and base it on the cost of having a robot replace a human worker. However, when you look at two years of operation, you can potentially triple your ROI.”—Caster
“Typical collaborative robot applications are significantly smaller and with less peripheral equipment required compared to industrial robot applications, which greatly reduces total investment costs. Manual labor cost can be reduced by introducing collaborative robots. Alternatively, when a company want to expand production capacity, they can deploy collaborative robots instead of hiring more manual labor.”—Zhang
“Cobots increase productivity, improve worker safety and don't require the huge upfront costs associated with traditional industrial automation. We find that on average, ROI on a cobot purchase is around 12 months, but it's not uncommon for companies to see ROI in as little as 3 months, depending on the application.” --Campbell

A Universal Robots UR10e performing inspection of cradle subassemblies at Comprehensive Logistics in Ohio. (Image: Universal Robots)
13. What is the price range of cobots?
“While cobots might be a bit more costly than traditional industrial robots, this cost premium is often mitigated by the reduction of the need for some safety equipment, depending on a risk assessment. This could include fences or other barriers which take up costly floorspace.”—Caster
“With traditional robots, the capital costs for the robots themselves account for only 25 to 30 percent of the total system costs. The remaining costs are associated with robot programming, setup, and dedicated, shielded work cells. The ‘out of box experience’ with a collaborative robot is typically less than an hour. That’s the time it takes to unpack the robot, mount it, and program the first simple task. Our cobots also take up much less floor space than a ‘traditional’ industrial application as they typically don’t require safety cages, depending on the risk assessment, due to the built-in safety system that makes the robot stop when it encounters obstacles in its route. But with financing available to support rental and lease programs, it's possible to get cobots working in your facility with negligible upfront costs.”--Campbell
14. What is the first application that someone ought to try with a cobot?
“Our experience is a great first application is one where a repetitive quality check is needed. So a vision camera or sensor carried by the collaborative robot inspects the part and feeds back data to a central source. An example would be ‘gap and flush’ quality measurement used by many automotive OEMs.” --Dueweke
“Robots excel at repetitive tasks with little variation—loading/unloading machines, pick-and-pack, pick-and-place. However, the first thing someone should do is look at their application to determine if a cobot is the right robot for the job. It could be that an industrial robot with an appropriate safety scanner is a better, more economical option.”—Caster
“Material handling, pick and place, tending a laser-marking machine or small CNC machine, different kinds of quality inspection, and assembly applications.”—Zhang
“It depends on whether you got a cobot with a specific application in mind or not. If you purchased a cobot to perform a specific application, say quality inspection or palletizing, then it's a good idea to start simple within that application domain. If you purchased a cobot as a flexible, general-purpose robot with the intention of using it in several applications, then one of the best ways to understand what your cobot is capable of is to quickly set it up on any simple application. Within minutes, you'll have a sense of the ease of use, within an hour you will be able to program a simple application and within days you'll be able to take on bigger challenges with confidence. It's important to keep compatibility in mind when purchasing or renting a cobot for general-purpose use. Will your cobot work seamlessly with a wide range of end-of-arm tools? Or will you have to fly in an expensive robot programmer every time you need to switch applications?”--Campbell
RELATED CONTENT
-
On Electric Pickups, Flying Taxis, and Auto Industry Transformation
Ford goes for vertical integration, DENSO and Honeywell take to the skies, how suppliers feel about their customers, how vehicle customers feel about shopping, and insights from a software exec
-
On Automotive: An All Electric Edition
A look at electric vehicle-related developments, from new products to recycling old batteries.
-
GM Develops a New Electrical Platform
GM engineers create a better electrical architecture that can handle the ever-increasing needs of vehicle systems